code

share




Think about how you perform basic arithemetic - say how you perform the multiplication of two numbers. If the two numbers are small - say $8$ times $7$, or $5$ times $2$ - you can likely do the multiplication in your head. This is because in school you likely learned a variety of tricks for multiplying two small numbers together - say up to two or three digits each - as well as algorithms for multiplying two arbitrary numbers by hand. Both the tricks and the algorithm are valuable tools to have when computing e.g., interest on a loan or investment, making quick back of the envelope calculations, etc., But even though the algorithm for multiplication is simple, repetitive, and works regardless of the two numbers you multiply together you would likely never compute the product of two arbitrarily large numbers yourself - like $140,283,197,523 \times 224,179,234,112$. Why? Because while the algorithm for multiplication is simple and repetitive, it is time consuming and boring for you to enact yourself. Instead you would likely use a calculator to multiply two arbitrarily large numbers together because it automates the process of using the multiplication algorithm. An arithmetic calculator allows you to compute with much greater efficiency and accuracy, and empowers you to use the fruits of arithmetic computation for more important tasks.
This is precisely how you can think about the computation of derivatives / gradients. Perhaps you can compute the derivative of simple mathematical functions in your head - like e.g., $g(w) = w^3$ and $g(w) = \text{sin}(w)$. This is because in school you likely learned a variety of tricks for computing the derivative of simple functions - like sums of elementary polynomials or sinusoids - as well as algorithms for computing the derivative or gradient of arbitrarily complicated functions (if not you can find a refresher on these subjects in the text's Appendix). These skills are useful - as some level of familiarity with them is requisite in order for one to grasp basic concepts in optimization as well as the examples used to flush them out. But even though the algorithm for gradient computation is simple, repetitive, and works regardless of mathematical function you wish to differentiate you would likely never compute the gradient of an arbitrarily complicated function yourself - like $g\left(w_1,w_2\right) = 2^{\text{sin}\left(0.1w_1^2 + 0.5w_2^2\right)}\text{tanh}\left(\text{cos}\left(0.2w_1w_2\right)\right)\text{tanh}\left(w_11w_2^4\text{tanh}\left(w_1 + {\text{sin}\left(0.2w_2^2\right)} \right) \right)$. Why? Because while the algorithm for computing derivatives is simple and repetitive, it is time consuming and boring for you to enact yourself. Instead you would likely use a calculator to compute the derivatives of an arbitrary complicated mathematical functions because it automates the process of using the differentiation algorithm. A gradient calculator allows you to compute with much greater effeciency and accuracy, and empowers you to use the fruits of gradient computation for more important tasks - e.g., for the popular first order local optimization schemes that are widely used in machine learning.
Gradient calculators are more commonly called Automatic Differentiators. In this Section we demonstrate how to use a simple yet powerful Automatic Differentiator written in Python called autograd, a tool we will make extensive use of throughout the text. Interested users can also see this text's electronic resources for an analagous walkthrough of the PyTorch version of autograd as well. In later Chapters and the appendix of this text we will dive deeply into more technical details about how Automatic Differentiators work, but for now we simply need to know how to use one - which is what this Section is all about.
autograd¶Autorad is an open source professional grade gradient calculator, or Automatic Differentiator. Built with simplicity in mind, autograd works with the majority of numpy based library, i.e., it allows you to automatically compute the derivative of functions built with the numpy library. Esentially autograd can automatically differentiate any mathematical function expressed in Python using basic functionality and methods from the numpy library. It is also very simple to install: simply open a terminal and type
pip install autograd
to install the program. You can also visit the github repository for autograd via the link below
https://github.com/HIPS/autograd
to download the same set of files to your machine.
Along with autograd we also highly recommended that you install the Anaconda Python 3 distribution - which you can via the link below
https://www.anaconda.com/download/
This standard Python distribution includes a number of useful libraries - including numpy, the matplotlib plotting library, and Jupyter notebooks.
autograd¶Here, we show off a few examples highlighting the basic usage of the autograd Automatic Differentiator. By default this gradient calculator employs the reverse-mode of Automatic Differentiation - also called backpropogation - which we discuss in detail in Chapter 12. With simple modules we can easily compute compute derivatives of single input functions, and partial derivatives / complete gradients of multi-input functions written in Python. We show how to do this using a variety of examples below.
Note: If you follow along in the Jupyter notebook version of this Section you can also see how to use the matplotlib plotting library to produce two-dimensional and three-dimensional plots.
autograd¶Since autograd is specially designed to automatically compute the derivative(s) of numpy code, it comes with its own wrapper on the basic numpy library. This is where the differentiation rules - applied specifically to numpy functionality - is defined. You can use autograd's version of numpy exactly like you would the standard version - nothing about the user interface has been changed. To import this autograd wrapped version of numpy use the line below.
# import statement for autograd wrapped numpy
import autograd.numpy as np
Now, lets compute a few derivatives using autograd. We will begin the demonstration with the simple function $g(\left(w\right) = \text{tanh}\left(w\right)$ whose derivative function - written algebraically - is $\frac{\mathrm{d}}{\mathrm{d}w}g\left(w\right) = 1 - \text{sech}^2\left(w\right)$.
There are two common ways of defining functions in Python. First the the standard def named Python function declaration like below
# a named Python function
def g(w):
return np.tanh(w)
WIth this declaration Python now understands g as its own function, so it can be called as follows.
# how to use the 'tanh' function
w_val = 1.0 # a test input for our 'sin' function
g_val = g(w_val)
print (g_val)
You can also create "anonymous" functions in Python - functions you can define in a single line of code - by using the lambda command. We can produce the same function using lambda as shown below.
# how to use 'lambda' to create an "anonymous" function - just a pithier way of writing functions in Python
g = lambda w: np.tanh(w)
We can then use it with a test value as shown below.
# how to use the 'sin' function written in 'anonymous' format
w_val = 1.0
g_val = g(w_val)
print (g_val)
And - of course - regardless of how we define our function in Python it still amounts to the same thing mathematically/computationally.
Notice one subtlety here (regardless of which kind of Python function we use): the data-type returned by our function matches the type we input. Above we input a float value to our function, and what is returned is also a float. If we input the same value as a numpy array then numerically our function of course computes the same evaluation, but evaluation is returned as a numpy array as well. We illustrate this below.
# if we input a float value into our function, it returns a float
print (type(w_val))
print (type(g_val))
# if we input a numpy array, it returns a numpy array
w_val = np.array([1.0])
g_val = g(w_val)
print (g_val)
print (type(w_val))
print (type(g_val))
This factoid has no immediate consequences, but it is worth taking note of to avoid confusion (when e.g., comparing the output when evaluating at single points - which are naturally dealt with by inputing a float - versus multiple points, which is more naturally dealt with by inputing a numpy array). Much later - when we are constructing considerably complex functions we need to differentiate - this will be something to keep in mind for de-bugging purposes.
We can visualize either version of our function by using matplotlib assets, as shown below. Here we will plot the lambda version - over a fine range of points on the interval $[-5,5]$.

Now, using autograd we can then compute the derivative of our function here automatically. Below we show the proper import statement and manner of using the gradient calculator - called grad.
# import statment for gradient calculator
from autograd import grad
To use grad we simply pass in the function we wish to differentiate. grad works by explicitly computing the computation graph of our input, giving us a Python function for its derivative that we can then evaluate wherever we want. It does not provide an algebraic function, but a Python function. Here we call the derivative function of our input dgdw.
# create the derivative/gradient function of g --> called dgdw
dgdw = grad(g)
The gradient function can be evaluated like our original Python function - as shown below.
# evaluate the gradient function at a point
w_val = 1.0
print (dgdw(1.0))
Just as with our original Python function we can then evaluate our gradient dgdw over a fine range of input and plot the result. We do this below, plotting the original function as well for comparison.

We can compute higher order derivatives of our input function by using the same autograd functionality recursively, i.e., by plugging in the derivative dgdw into autograd's grad function. Doing this once gives us the second derivative Python function - which we call dgdw2 - as shown below.
# compute the second derivative of our input function
dgdw2 = grad(dgdw)
We can then plot the input function, as well as the first and second derivatives, as shown below.

Above you may notice that the derivative function dgdw we have constructed returns only the derivative evaluation, and not the function evaluation itself (we have computed this separately when e.g., plotting a range of function / derivative values above). However as we described in the previous Sections, an Automatic Differentiator will always need to compute the value of the function itself whenever we use it to compute a derivative / gradient evaluation. So - in other words - whenever we evaluate the gradient, we get the function evaluation for free. This is a very handy technical fact which will save us a ton of computation later on when we discuss e.g., supervised learning models.
We can already see an example of the waste - e.g., in the previous example when we evaluated / plotted the function and its first derivative there was no need to actually evaluate the function explicitly since these computations are already performed when we evaluate the gradient. However when we used autograd's grad functionality to compute the gradient of our function in the previous example, and then evaluated it at a single point, grad only returned a single value: the evaluation of the derivative. No function evaluation was returned - so where is the mirror function evaluation? Well the function evaluation is indeed being computed 'under the hood' of grad, it is simply not being returned via this method. This is a design choice made by the authors of autograd to keep the interface of grad - their introductary Automatic Differentiation method - easy to pick up and use for a wide audience. Later when the need to re-compute function evaluations becomes quite costly we will use this autograd method exclusively (one can view the entire list of autograd methods available here.
Now there is another autograd method called value_and_grad that returns everything computed 'under the hood' - both the derivative(s) and function evaluations. Below we use this autograd functionality to re-produce the previous example first derivative calculations.
# import statement for gradient calculator - this method will return both
# derivative and function evaluations (the latter always being computed 'under
# the hood')
from autograd import value_and_grad
# how to use 'lambda' to create an "anonymous" function - just a pithier way of writing functions in Python
g = lambda w: np.tanh(w)
# create the derivative/gradient function of g --> called dgdw
dgdw = value_and_grad(g)
We have our derivative function dgdw above computed now using value_and_grad. Below we plug in a single point into this derivative function, and what is returned is both the function (left value) and derivative (right value) evaluation. This function evaluation comes 'for free' whenever we evaluate the derivative - we need not evaluate the function itself again.
# evaluate the gradient function at a point
w_val = 1.0
print (dgdw(1.0))
Now we use this to plot both the function and derivative over the same range used in the previous example - again without re-computing the function evaluations.

Using autograd we can quickly illustrate Taylor series approximations (see the Appendix for definition) of any single-input function. Below we illustrate the tanh function, along with a first order Taylor series approximation
\begin{equation} h(w) = g(w^0) + \frac{\mathrm{d}}{\mathrm{d}w}g(w^0)(w - w^0) \end{equation}
centered at the point $w^0 = 1$. First we produce this function and its first order Taylor series approximation in Python below.
# create function / first derivative
g = lambda w: np.tanh(w)
dgdw = grad(g)
# create first order taylor series approximation - as a Python function
# here w_0 is the center point of the expansion
first_order = lambda w_0,w: g(w_0) + dgdw(w_0)*(w - w_0)
Now we evaluate and plot the function and its first order approximation. The function is shown in black, its first order approximation centered at $w_0 = 1$ is shown in green, and the point of tangency with the function shown as a red point.

Its just as easy to show the second order Taylor series approximation as well, whose formula is given as
\begin{equation} h(w) = g(w^0) + \frac{\mathrm{d}}{\mathrm{d}w}g(w^0)(w - w^0) + \frac{1}{2}\frac{\mathrm{d}^2}{\mathrm{d}w^2}g(w^0)(w - w^0)^2. \end{equation}
Below we compute and plot both the tanh function, along with its first and second order Taylor series approximations at the point $w^0 = 1$.
# create second derivative function
dgdw2 = grad(dgdw)
# create second order taylor series approximation - as a Python function
# here w_0 is the center point of the expansion
second_order = lambda w_0,w: g(w_0) + dgdw(w_0)*(w - w_0) + 0.5*dgdw2(w_0)*(w - w_0)**2
The first and second order approximations are shown below in green and blue respectively, with the point of expansion again shown as a red point.

autograd¶There are a number of ways we can go about using autograd to compute the partial derivatives of a multi-input function. First lets look at how to use autograd to compute partial derivatives individually, or one-at-a-time.
As an example lets look at the following function
\begin{equation} g\left(w_1,w_2\right) = \text{tanh}\left(w_1w_2\right). \end{equation}
This simple function takes in two inputs - $w_1$ and $w_2$ - and here we have written them out explicitly. Below we translate this function into Python - note here we use the longer form def version of a Python function, but we could of course use the pithier lambda version if we like.
# a simple multi-input function defined in python
def g(w_1,w_2):
return np.tanh(w_1*w_2)
Taking in two inputs, this function lives in three dimensions. Below we plot it over a small range of its input.

Now we use autograd's grad function to compute the two partial derivative functions here. In this example since our function $g$ takes in two inputs its gradient consists of two partial derivative functions each of which takes in the two inputs $w_1$ and $w_2$ as well
\begin{equation} \nabla g\left(w_1,w_2\right) = \begin{bmatrix} \frac{\partial}{\partial w_1}g\left(w_1,w_2\right) \\ \frac{\partial}{\partial w_2}g\left(w_1,w_2\right) \end{bmatrix}. \end{equation}
We can use the same autograd functionality used previously with single input functions here, with one simple addition - now we specify which partial derivative function we wish to construct. If we use the exact same call we used e.g., in the previous example and write
grad(g)
here - since our function takes in two inputs - this will return the first partial derivative $\frac{\partial}{\partial w_1}g\left(w_1,w_2\right)$. This is the default setting of each automatic differentiation method in autograd.
Alternatively to compute this partial derivative function we can explicitly pass a second argument to grad - or any of the other autograd methods - which is a simple index denoting which partial derivative we want. To create the same (first) partial derivative this way we pass in the index 0 - since Python indexing starts with 0
grad(g,0)
To construct the second partial derivative we use the same Pythonic language, but pass the second index 1
grad(g,1)
More generally speaking, if $g$ took in $N$ inputs $w_1$ through $w_N$ we can construct its $n^{th}$ partial derivative using the same pattern as
grad(g,n-1)
and so on.
Back to our example - below define both partial derivatives using these commands below.
# compute the gradient of our input function
dgdw1 = grad(g,0)
dgdw2 = grad(g,1)
These two partial derivative functions can now be used precisely as the original function $g$ in Python, which we do to produce plots of each as shown below.

autograd¶Building on the previous example, here we look at how to use autograd to construct several partial derivative functions or the entire gradient of a multi-input function. We do this via example, using the same of function employed in the previous example.
There are two ways to construct multiple partial derivative functions at once - including the full gradient - using autograd. The first way is to simply index all the partial derivatives desired using the same sort of notation introduced previously. So here - for example - if we wish to construct the full gradient of our function (it has two partial derivatives) we tell autograd of this desire by feeding in the two indices $(0,1)$ as shown below
grad(g,(0,1))
More generally, for a function taking in $N$ inputs, to construct any subset of partial derivatives at once we use the same sort of indexing notation. Note: this usage applies to all methods in the autograd automatic differentiation library (like e.g., value_and_grad).
We do this below for the function shown in the previous example, producing a function for its complete gradient.
# construct all partial derivative functions at once
nabla_g = grad(g,(0,1))
The second way to construct several derivatives at once using autograd is by writing a function in numpy where all the desired variables we wish to differentiate with respect to are all input into the function as a single argument. For example, if instead of writing out our function in Python as
# a simple multi-input function defined in python
def g(w_1,w_2):
return np.tanh(w_1*w_2)
where both $w_1$ and $w_2$ are fed in one-at-a-time, if we write it equivalently using vector-notation where $\mathbf{w} = \begin{bmatrix}w_1 \\ w_2 \end{bmatrix}$ as
def g(w):
return np.tanh(w[0]*w[1])
then the call
grad(g)
or equivalently
grad(g,0)
will produce derivatives of $g$ with respect to its first argument - which here will give us the complete gradient of $g$. Before that first argument was just $w_1$, but now in our new way of writing the function it is the complete set of inputs $\mathbf{w}$ (i.e., all partial derivatives of the function).
This indexing format holds more generally as well - if in the way we express a function in numpy it takes in $N$ inputs, the statement
grad(g,n-1)
computes the derivatives of the function with respect to whatever the $n^{th}$ input is - i.e., whether it is a single variable or multiple variables.
As another example, take the inner product function of two length $M$ vectors $\mathbf{a}$ and $\mathbf{b}$
\begin{equation} g\left(\mathbf{a},\mathbf{b}\right) = \mathbf{a}^T\mathbf{b} \end{equation}
Writing
grad(g)
or
grad(g,0)
gives us the partial derivative functions for all entries of $\mathbf{a}$. Likewise
grad(g,1)
gives us the partial derivative functions for all entries of $\mathbf{b}$.
Automatic Differentiators are gradient calculators that compute and provide a compute program-based function for evaluating the derivative(s) of a function. There are however other kinds of gradient calculators - including Numerical Differentators and Symbolic Differentiators. The former are built using the fundamental limit definition of the derivative (not the derivative rules themselves). While simple to implement they have stability issues that make them less useful as a universal gradient calculator (this is discussed in further detail in the text's appendix). Symbolic Differentiators - which computes an algebraic formula for derivatives instead of a compute program function - are far less useful for our applications since we primarily need programmatic gradient functions (for use in local optimization schemes). In addition, algebraic derivative equations can quickly become unweildly and require large amounts of memory to represent (particularly with multi-input functions, which we deal with extensively in machine learning).
autograd¶Mathematical functions come in all shapes and sizes and - moreover - we can often express indnividual equations in a variety of different ways. This short section discusses a standardization technique called function flattening, which allows us to express any mathematical function in the generic form $g\left(\mathbf{w}\right)$ we have been using thus far. Flattening is a particularly useful pre-processing step as it allows us to more broadly understand the fundamental optimization precepts we have / will see as well as more easily implement (in code) local optimization steps of the generic form
\begin{equation} \mathbf{w}^{k} = \mathbf{w}^{k-1} + \alpha \, \mathbf{d}^{k}. \end{equation}
Take the following quadratic function $f$ of two $N\times 1$ variables $\mathbf{a}$ and $\mathbf{b}$
\begin{equation} f\left(\mathbf{a},\mathbf{b} \right) = \left(\sum_{n=1}^{N} a_nb_n\right)^2. \end{equation}
This function is not written in the generic form $g\left(\mathbf{w}\right)$ we have used throughout this Chapter (and which we will use throughout future Chapters as well), but of course all of the principles and algorithms we have seen / will see still apply to it. So we can e.g., apply gradient descent to minimize the function. To do this however we need to compute the gradient of $h$ with respect to each input variable $\mathbf{a}$ and $\mathbf{b}$, and descend in each input variable as
\begin{equation} \begin{array} \ \mathbf{a}^k = \mathbf{a}^{k-1} - \alpha \, \nabla_{\mathbf{a}}\,f\left(\mathbf{a}^{k-1},\mathbf{b}^{k-1}\right) \\ \mathbf{b}^k = \mathbf{b}^{k-1} - \alpha \, \nabla_{\mathbf{b}}\,f\left(\mathbf{a}^{k-1},\mathbf{b}^{k-1}\right) \\ \end{array} \end{equation}
in order to complete the $k^{th}$ step.
There is a absolutely nothing wrong with this - it is a valid gradient descent step for the function given above. It is however slightly more cumbersome to write - and implement - than a function of a single set of inputs like our standard $g\left(\mathbf{w}\right)$ whose descent step can be written and implemented in a single line (one taken in $\mathbf{w}$). This annoyance is greatly amplified when dealing with functions of many inputs variables - which can be scalars, vectors, or even matrices - which we will regularly encounter during our machine learning voyage. For such functions, in order to take a single gradient descent step we must loop over their many different input variables.
Thankfully every mathematical function can be re-expressed so that all of its input variables are represented as a single contiguous array $\mathbf{w}$, which alleivates this irritation. For example in the example above we can easily see that by re-indexing entries of $\mathbf{a}$ and $\mathbf{b}$ using a single array as
\begin{equation} \mathbf{w} = \begin{bmatrix} a_1 \\ \vdots \\ a_N \\ b_1 \\ \vdots \\ b_N \\ \end{bmatrix} = \begin{bmatrix} w_1 \\ \vdots \\ w_N \\ w_{N+1} \\ \vdots \\ w_{2N} \\ \end{bmatrix} \end{equation}
the function in equation (1) above can then be equivalently written as
\begin{equation} g\left(\mathbf{w}\right) = \sum_{n=1}^N\left(w_nw_{n+N}\right)^2. \end{equation}
Again note that all we have really done here is re-indexed the entries of both input vectors in a contiguous manner. When expressed in this standardized manner we can both more easily reference optimization principles (which were scribed in Sections for functions in this standard form) and implement local optimization schemes like gradient descent in a less cumbersome way in a single line of algebra or autograd Python code, instead of requiring a loop over each input variable. This variable re-indexing scheme is called function flattening, and can be applied to any mathematical function in principle.
While performing the re-indexing required to flatten a function properly by hand for each and every function we come across is important, it (like derivative computation itself) is a repetitive and time consuming operations for human to perform themselves. Therefore in practice we will automate this task, employing a flattening module from the Python autograd library. This module can be imported from the autograd library (introduced in the previous Section) via the line below.
# import function flattening module from autograd
from autograd.misc.flatten import flatten_func
To flatten a mathematical function scribed in numpy and Python called f - written in such a way that it takes in a single list containing all of its input variables - we then simply call the line below. Here on the right hand side weights is a list of initializations for input variables to the function f. The outputs g, unflatten_func, and w are the flattened version of f, a module to unflatten the input weights, and a flattened version of the intitial weights respectively.
# flatten an input function g
g, unflatten_func, w = flatten_func(f, input_weights)
This flattened function and initialization can then be directly used with the gradient descent implementation given above.
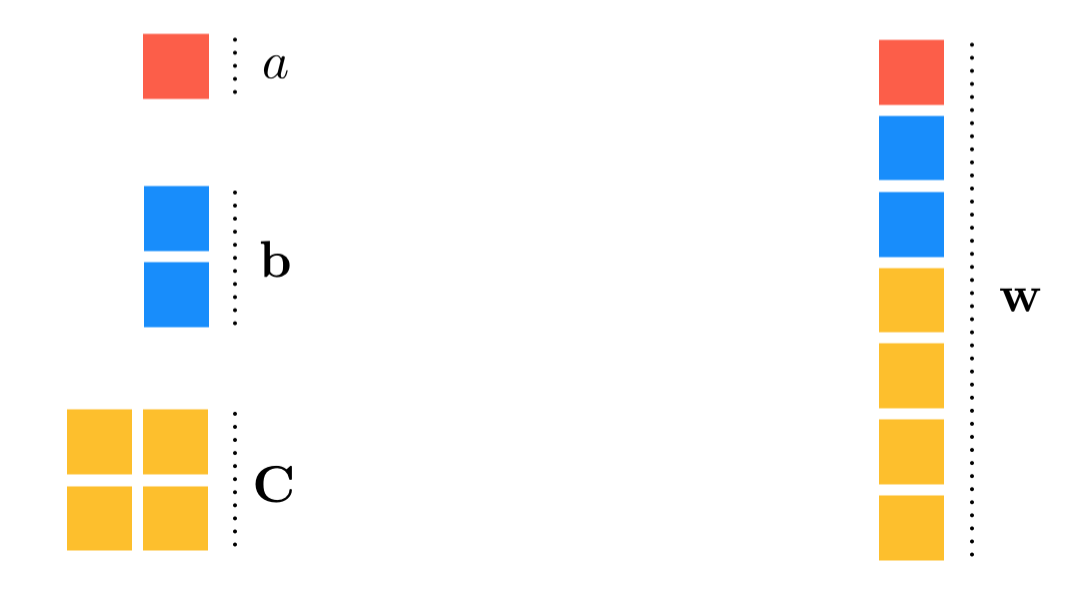
In this example we take the following function of several variables - a scalar, vector, and matrix
\begin{equation} f\left(a,\mathbf{b},\mathbf{C}\right) = \left(a + \mathbf{z}^T\mathbf{b} + \mathbf{z}^T\mathbf{C}\mathbf{z} \right)^2 \end{equation}
and flatten it using the autograd module flatten_func in order to then minimize it using the gradient descent implementation given above. Here the input variable $a$ is a scalar, $\mathbf{b}$ is a $2 \times 1$ vector, $\mathbf{C}$ is a $2\times 2$ matrix, and the non-variable vector $\mathbf{z}$ is fixed at $\mathbf{z} = \begin{bmatrix} 1 \\ 1 \end{bmatrix}$.
Below we define a Python version of the function defined above. Note here that the input to this implementation is a list of the functions input variables (or weights).
# Python implementation of the function above
z = np.ones((N,1))
def f(input_weights):
a = input_weights[0]
b = input_weights[1]
C = input_weights[2]
return (((a + np.dot(z.T,b) + np.dot(np.dot(z.T,C),z)))**2)[0][0]
By using the flatten_func module as shown above we can then minimize the flattened version of this function properly. We show a cost function history from one run of gradient descent below - where $15$ steps were taken from a random initialization. This run reaches a point very near the function's minimum at the origin.
